Autonomous driving on roundabouts - Automotive News #16
Autonomous driving on roundabouts
Department of Mathematics & Computer Science | Eindhoven University of Technology
In order to enable safe autonomous driving in urban areas, a correct perception of the road and environment by the autonomous car is vital. Therefore, having a robust and reliable environment perception system is crucial. Dr. Marvin Raaijmakers, recently promoted at the Department of Mathematics and Computer Science, developed such a system, and successfully tested it on roundabouts; a common road element in and around cities that has not yet been investigated in the field of autonomous driving.

Sensor based observations
In collaboration with Audi AG researchers, Raaijmakers worked on improving the technique of detecting the environment of the car. This research started with improving sensor-based observations. Autonomously driving cars use sensor data not only to observe the infrastructure around the vehicle, but also to predict the continuation of the road. To date, the environment perception system determined the most likely hypothesis on the continuation of the road, which was used by the car to position itself.
Together with his colleagues, Raaijmakers developed a new method: the multi-hypothesis road representation. The idea behind this model is that the driving behavior of an autonomous car is not based upon the most likely hypothesis on how the road continues, but on a collection of all plausible hypotheses, including the degree of certainty about these hypotheses. This provides a robust basis of information about the road on which the car is driving, creating a safer choice for its position on the road.
Combining sensor data with map data
To be able to drive on a roundabout, an autonomous car must know the geometry of the roundabout relative to the vehicle itself. In order to make this possible, Raaijmakers developed an algorithm for an environment perception system that determines the central island of the roundabout. However, with sensors only it is not yet possible to detect all elements that are relevant for autonomous driving. The model Raaijmakers proposed, in which sensor data is combined with the detailed data of a digital map, provides the solution. Several practical tests have shown that with this model the geometry of a complete roundabout is accurately calculated up to 20 centimeters.
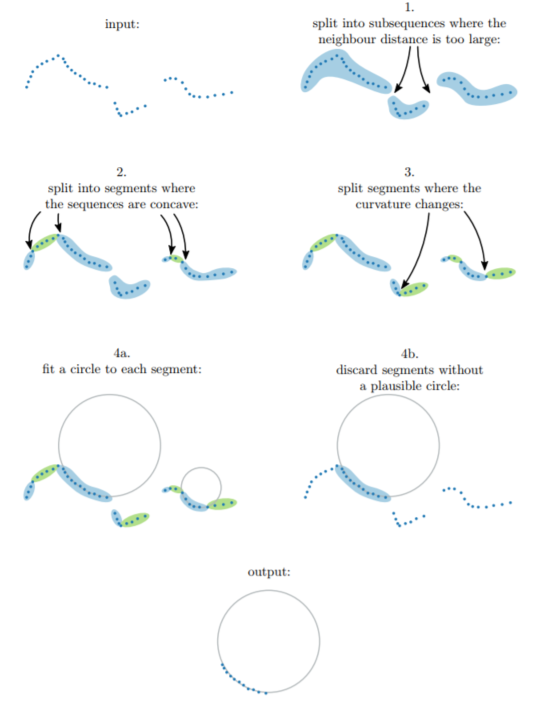
Schematic representation of the algorithm
A problem that arises when a fully autonomous driving car uses map data is that the data must be 100% correct. And that does not always prove to be the case. However, up and until now no research has been conducted into automated verification of the correctness of map data. In his dissertation, Raaijmakers therefore devotes extensive attention to this topic. First he proposes conditions to such a map verification model. He then discusses several case studies in which the verification model is used. Although the proposed model does not yet lead to the desired outcome, it is an important step towards creating a map verification model.
Future work
Raaijmakers’ work cannot be taken directly into production. Because there are many different kinds of roundabouts, the developed technique is not able to correctly recognize every single roundabout. Although further research is needed, Raaijmakers has now proven that fully autonomous driving on roundabouts is possible using a combination of sensor data and map data.
https://medium.com/@TUeindhoven/autonomous-driving-on-roundabouts-68d70999ae5e
Hi! I am a robot. I just upvoted you! I found similar content that readers might be interested in:
https://medium.com/@TUeindhoven/autonomous-driving-on-roundabouts-68d70999ae5e