[FR]Comment fonctionnent les voitures autonomes ? [Comment nous déplacerons nous demain ? #1]

Bonjour à tous !
Je vous présente aujourd'hui la première série d'articles concernant les innovations dans le domaine de la mobilité et des transports. Cette série comprendra plusieurs articles (entre 3 et 5 normalement) décrivant différents projets et innovations visant à améliorer la façon dont nous nous déplaçons.
La première innovation dont j'aimerais vous parler et qui est sûrement la plus évidente : les voitures autonomes.
Mais avant de commencer, j'aimerais vous remercier pour le merveilleux accueil que vous avez fait à mon premier article, je ne m'attendais pas du tout à ça, merci beaucoup à vous ! Et merci à @steemSTEM pour leur soutien ainsi qu'à @ixindamix pour m'avoir permis d'apparaître dans un article de @ocd :)
Qu'es-ce que c'est ? Et pourquoi ça existe ?
Les voitures autonomes sont des véhicules capables de se déplacer sur le réseau routier sans intervention humaine, sans chauffeur. Le confort, l'autonomie des personnes ne pouvant conduire et la sécurité sont les arguments mis en avant par les entreprises du secteur. En effet, les voitures autonomes devraient réduire drastiquement le nombre d'accidents liés aux facteurs humains (accidents dûs aux somnolences, au taux d'alcool, à une vitesse excessive ou encore à cause de distractions comme le téléphone). Ces accidents représentent plus de 90% des causes d'accidents en France (d'après ONISR) en 2014 et aux USA (d'après NHTSA) en 2016.
Comment ça fonctionne ?
Pour vous décrire le fonctionnement d'une voiture autonome, je vais utiliser comme exemple celles de Waymo qui est une filiale de la maison mère de Google, Alphabet Inc, car ils ont déjà parcouru plus de 6 millions de km avec environ un désengagement (le moment où le conducteur reprend le volant) tout les ~8000 km (soit environ un aller-retour Toronto-Los Angeles) en 2016 d'après Waymo et qu'ils communiquent souvent.

Lorsqu'une société souhaite créer une voiture autonome elle dispose généralement de 3 choix (en plus de la simulation) :
- Ajouter leur matériel sur une voiture produite en masse par un constructeur automobile après la sortie d'usine
- Intervenir sur la chaîne d'assemblage d'une voiture produite en masse pour changer certaines parties du design et y mettre leur matériel
- Créer leur propre modèle de voiture (ou du moins un prototype)
Concernant Waymo, ils ont commencé en 2009 avec des Toyota Prius ainsi que des Lexus RX450h sur lesquels ils ont greffé leur matériel après la sortie d'usine.

Puis ils ont créé leur propre prototype de voiture entièrement designé pour être une voiture autonome, la Firefly (vous pouvez en apprendre plus sur la conception de celle-ci grâce cet article) :

Et depuis 2017 Waymo travaille avec Chrysler et utilise des versions modifiées du minivan hybride Chrysler Pacifica dont le design a été légèrement modifié spécialement pour la conduite autonome et pour embarquer tout le matériel nécessaire.
Les capteurs :
Maintenant que nous voyons à quoi ressemble une voiture autonome, voyons comment elles fonctionnent. Le premier truc dont je vais vous parler est un élément que l'on retrouve sur toutes les voitures autonomes mais qui est très apparent chez Waymo, je veux parler de ce machin là :
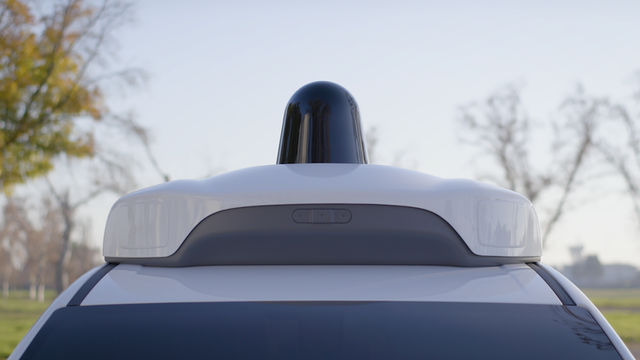
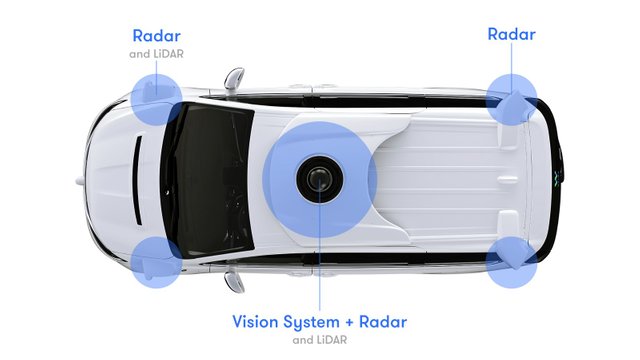
Ce machin, c'est un ensemble de capteurs composé d'un LiDAR (Light Detection and Ranging), d'un RADAR (Radar Detection and Ranging) ainsi qu'un système de vision (une caméra 360°). C'est sûrement les capteurs les plus importants et le plus chers (un unique ensemble pouvant atteindre les $75 000 selon Waymo) que les voitures autonomes possèdent car c'est celui-ci qui permet à la "voiture de voir". En effet la combinaison de ces 3 capteurs permet de repérer quasiment n'importe quel objet qu'il soit proche ou éloigné (Waymo estime que la dernière génération est capable de détecter des objets à une distance de 2 terrrains de football américain, soit 220m). On peut trouver 4 autres RADARs et/ou LIDARs sur le minivan servant à couvrir les angles mort des capteurs sur le toit. Ils sont répartis comme ceci :
Pourquoi utiliser différents capteurs ?
Les RADARs et LIDARs fonctionnent sur le même principe, on envoie une onde d'une certaine longueur d'onde et on mesure le temps qu'elle met à revenir, on obtient comme ceci la distance que l'onde a parcourue connaissant sa vitesse (on reparlera dans un prochain article des capteurs de distances). Mais ils ont aussi un point faible commun : ils peuvent être tous les deux perturbés si l'émetteur d'un autre capteur utilise la même longueur d'onde.
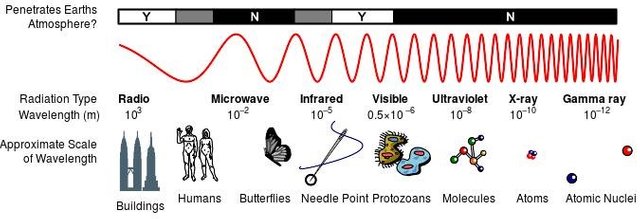
La différence réside dans la longueur d'onde utilisée, pour les LIDARs elle appartient au domaine des infrarouges le plus souvent (entre 1500 et 2000 nm soit environ 10^-6, voir le spectre ci-dessus) cela a pour conséquence que les LIDARs sont très précis et peuvent détecter de petits objets mais en contrepartie les LIDARs sont très facilement perturbés par les changements de luminosités.
C'est ici qu'interviennent les radars, il faut un capteur qui vienne combler les défauts du LIDAR, grâce à sa longue longueur d'onde (domaine des ondes radio) le radar est capable de détecter des objets plus éloignés mais ne peut détecter de petits objets et ils ne sont pas précis.
La caméra, quant à elle, a pour but d'aider à identifier les objets autour de la voiture, que ce soient les panneaux, les types de voitures (policiers, pompiers, ...).
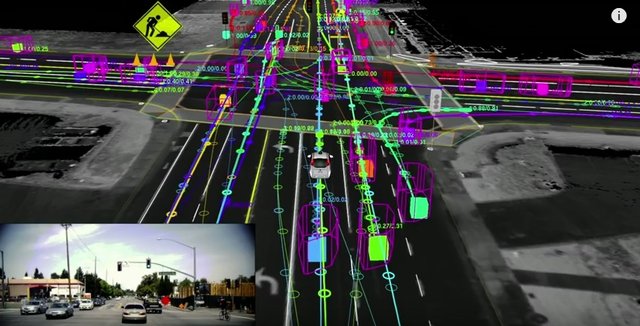
Les données de ces trois types de capteurs combinés à une carte routière et un système de localisation pouvant se passer de GPS en cas de perte de signal (sûrement grâce à un système semblable à l'odométrie, mesurant la rotation des roues) permettent d'obtenir une représentation de la réalité qui ressemble à ça :
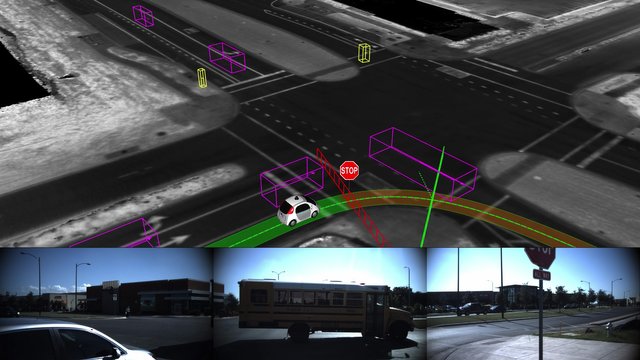
C'est celle-ci qui va permettre à l'ordinateur de prédire le déplacement des différents objets et ainsi de prendre des décisions sur les actions à effectuer. Une fois les trajectoires calculées elles pourront apparaître sur cette représentation mais cela devient illisible pour nous (et chacune de ces prédictions est mise à jour plusieurs fois par secondes) :
Le processus de décision :
Ce que j'appelle processus de décision ici est la partie "Traiter" d'une chaine d'information (une chaine d'information est une manière de représenter les fonctions d'un automate sous la forme de 3 d'entre elles: Acquérir (tout ce qui concerne la lecture des capteurs), Traiter, et Communiquer (corresponds ici à définir la vitesse et l'orientation des roues par exemple).
J'ai trouvé très peu d'informations sur le fonctionnement exact de leurs algorithmes mais voici l'ordre dans lequel je pense que se déroule les différentes actions :
- L'algorithme récupère une séquence de données fourni par les différents capteurs (les X dernières secondes par exemple)
- Puis on va tenter de prédire les trajectoires des différents objets en se basant sur leurs différentes positions, le type d'objets, ...
- L'algo va comparer les trajectoires à celle de la voiture et chercher des panneaux, tous types de signalisation (plots, lignes au sol, feux rouges, ...) ou des signes (le bras d'un cycliste voulant tourner, un policier qui fait la circulation, ...)
- L'algorithme va ensuite ordonner à la voiture d'accélérer, de freiner, de tourner ou de ne rien changer.
- Le cycle recommence et ceci plusieurs fois par secondes.
Bien sûr cette version est "très simplifiée" et vous pouvez apprendre à en faire une encore plus simple que celle-ci sur la chaîne youtube de Siraj Raval en regardant cette vidéo ou celle-ci si vous vous y connaissez un peu en Python. Dans ces vidéos Siraj utilise une intelligence artificielle pour contrôler la voiture, et il probable que Waymo en utilise plusieurs pour faire fonctionner leur voiture.
En effet, rien que la reconnaissance d'objets et de panneaux nécessite une intelligence artificielle pour fonctionner, on peu aisément soupçonner le Deep learning d'être impliqué dans cette tâche au vu des différents projets de Google, je pense en particulier à TensorFlow, qui une fois entrainer avec un dataset d'images (différentes images d'un même objet) peut reconnaitre différents objets. Cette théorie est soutenue par le fait que les nouveaux captchas (les tests de Turing permettant de distinguer humains et robots lors d'une inscription sur un site internet) vous demande de labelliser (associer un nom avec un objet contenu dans une image) des images de voitures et de panneaux actuellement. Cette technique avait déjà été employée pour la numérisation de livres il y a quelques années.

Si vous voulez tester la reconnaissance d'image de TensorFlow il y a une application de démo disponible sur Android dont on reparlera plus tard. :)
Les dilemmes :
Beaucoup de gens sont sceptiques à cause des décisions que pourrait faire une voiture autonome en cas de dilemme, le problème typique est le suivant :
La voiture autonome arrive au niveau d'un passage piéton, un enfant traverse alors que le feu piéton est rouge, la distance n'est pas suffisante pour s'arrêter et la seule issue disponible est un trottoir sur lequel il y a une grand-mère qui marche. Dans les deux cas l'issue est fatale.
Que doit faire la voiture ? Tuer l'enfant ou la grand-mère ?
Le MIT a poussé le problème plus loin en proposant un sondage éthique comportant différentes situations pour voir les choix que la majorité des personnes feraient, les choix que vous feriez dans ces situations.
Mais ce type de choix n'a peut-être pas lieu d'être, si nous avons des voitures autonomes pourquoi ne pas les faire communiquer avec l'équipement urbains (les feux entre autres) ainsi qu'avec les autres voitures (permettant à une voiture de signaler aux autres un potentiel danger). Chris Urmson (ancien leader du projet de voiture autonome d'Alphabet) a répondu à cette question à la fin de sa conférence par le fait qu'il n'y a pas de bonne réponse mais qu'ils font tout pour que la voiture puisse prévoir de manière fiable ce qui va se passer afin d'éviter ce genre de situation.
Ce genre de problèmes n'est pas ignoré par Waymo qui entraine sa voiture à savoir réagir à un maximum de situation possible ainsi qu'à adopter un comportement sécuritaire quand elle rencontre une situation nouvelle comme le montre cet extrait d'une conférence donnée par Chris Urmson en 2015 (à partir de 11:1) :
La simulation et l'utilisation des jeux vidéos :
En plus de leur flotte de véhicules qui circulent sur les routes tout les jours Waymo simule en continue 25 000 voitures qui font des millions de km chaque jours afin d'entrainer leurs algorithmes et observer les différents malfonctionnement. Et en écrivant cet article j'ai eu une idée (je ne sais pas si elle a déjà été mise en place au paravant) d'une manière de tester le comportement des voitures autonomes face aux usagers de la route. A l'aide d'un jeu vidéo en ligne dans lequel les joueurs interagiraient avec des voitures autonomes. Les joueurs pourraient se déplacer à pieds, en voitures ou en tout autres véhicules qu'une voiture autonome pourrait croiser en réalité et les développeurs pourraient étudier les réactions de leurs voitures selon le comportement des joueurs. La gamification de recherches scientifiques a déjà été utilisée plusieurs fois et a déjà fait ses preuves, alors pourquoi ne pas l'utiliser ici ?
Quand es-ce que ce sera disponible ?
Il est difficile de répondre à cette question car d'une part il reste certains défis à relever concernant la manière dont les voitures réagissent à des situations inconnues (ou à des changement de météo) et il faut que la voiture soit la plus sûre possible. De plus il n'existe pas de législation claire concernant la responsabilité en cas d'accident "fautif", es-ce que ce sera la faute du constructeur, de l'entreprise qui a développé le logiciel ou le capteur défaillant, du propriétaire de la voiture ? Les plus optimistes espèrent atteindre les premiers clients d'ici 2020-2025.
Dans un même temps des sociétés tentant de communiquer de mannière intuitive les intentions de la voiture autonome aux autres usagers à l'aide de bandes lumineuses :
Outre Waymo il existe d'autres projets intéressants autour des voitures autonomes comme celui de Otto (appartenant à UBER) ou encore la concept-car Renault Symbioz, mais il y en a bien d'autres.
Next, un projet pour fluidifier le traffic en ville :
Et pour finir cet article je voulais vous présenter un projet dans lequel je crois beaucoup : Next. Créer en Italie par 2 chercheurs, ce projet propose des pods autonomes et modulaires que vous pourriez commander depuis votre téléphone pour aller où vous souhaitez. C'est la parfaite combinaison entre les transports en commun et les moyens de transport personnels (voitures ou taxis/UBER). Et à en voir les articles qui parlent d'eux, je ne suis pas le seul à y croire.
Comment ça marche ?
A quoi ça sert ? Pourquoi c'est utile ?
En plus de pouvoir réduire le nombre d'accidents grâce à la conduite autonome des pods, ils pourront réduire les bouchons présents dans les centre-ville (d'après Le Parisien, les franciliens perdent 90 heures par an dans les bouchons, informations confirmées par V-Traffic) dont l'une des causes est les voitures avec une seule ou deux personnes à bord (d'après une enquête effectuée à Londres en 2011 (voir page 13) plus d'un million de personnes conduisent pour aller au boulant tandis que 64 000 sont passagers) ainsi que réduire le nombre de bouchons fantômes. Next optimisera le nombre de personnes par pods (chacun peut en emmener jusqu'à 6 assises et 4 debout) ainsi que les trajets effectué par ceux-ci en regroupant les personnes allant au même endroit. De plus, comparé aux bus les temps de trajets sont raccourcis étant donné qu'il n' y a pas besoin de s'arrêter pour changer de pod ou d'attendre le prochain passage à l'arrêt le plus proche. C'est pour cela que je vois en Next une solution plus flexible et confortable aux transports en commun tout en étant aussi simples à gérer une fois déployé qu'une flotte de bus et aussi simple et confortable qu'un Uber.
Et enfin voici une vidéo publié le 20 juillet 2017 montrant leur premier prototype à l'échelle :
Conclusion
Tout cela montre que les voitures autonomes ont un énorme potentiel pour améliorer la façon dont on se déplace aujourd'hui mais qu'il reste du chemin à parcourir.
De plus les voitures autonomes sont loin d'être les seules innovations dans le domaine des transports, je vous en présenterez quelques autres dans un prochain article !
Le sujet des voitures autonomes étant très débattu n'hésitez pas à poster vos avis en commentaire pour que l'on puisse en discuter :)
Pour aller plus loin :
- [EN] Conférence de Chris Urmson au SXSW Interactive 2016, 52min, les questions à la fin de la conférence sont très intéressantes
- Build a Self Driving Car in 5 Min
- How Self-Driving car could will communicate with you
un article excellent!! très détaillé, compréhensible, bien présenté! du très bon travail! J’imagine que tu y a passé bcp de temps!
Perso ce qui m'interesse e plus c'est la partie dilemme moral!
Voilà! continues comme ça, tu viens de gagné un aboné :-)
Merci :) Oui, j'y ai bien passé une vingtaine d'heures. Tu avais déjà fait le test du MIT ?
Le résultat est impec!
Non j'avais jamais entendu parler... Je m'en vais le faire :-)
Article très intéressant et absolument excellent, merci.
Merci ! J'ai tenté de le faire le plus complet possible :)
Super article ! Merci beaucoup !
Tous les projets présentés ont l'air géniaux, mais le projet Next est topissime !
Ouah , superbe article ! Upvoté
Merci !
BADASS cet article lol ^^ ;-)
Merci c' était super interressant !