[kr-science] 로봇공학(D.O.F.)
로봇공학에서 자유도는 기본적인 내용이며, 중요한 내용입니다.
6자유도[six Degree Of Freedom]라고 하죠.
롤(roll), 피치(pitch), 요(yaw), 서지(surge), 스웨이(sway), 히브(heave)의 6자유도 운동을 말합니다.
사실 자유도 개념은
[Bio-technology] Step 1.0에서 언급한적이 있습니다.
기억을 못하시겠지만...
X축으로 회전하는 것은 롤(roll)

Y축으로 회전하는 것은 피치(pitch)
Z축으로 회전하는 것은 요(yaw)
라고 합니다.
그리고 해당 축 방향으로 직진하는 것을
X는 서지(surge)
Y는 스웨이(sway)
Z는 히브(heave)
라고 합니다.
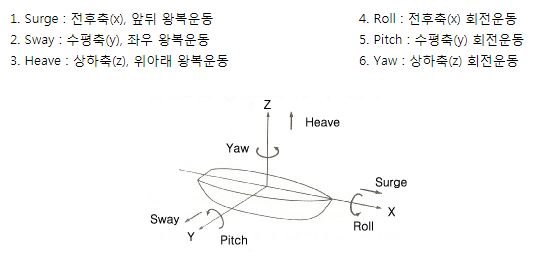
이렇게 6가지 의 자유도를 모아서 6자유도라고 말합니다.
인간의 손목에서부터 팔까지가 가지는 자유도는 그럼 얼마일까?
일단, 인간의 팔은 3개의 관절이 있으니까 팔의 상단부분은 몸의 중심평면상으로 평행한면에서 회전이 가능하며, 양어깨의 연직선상에서도 회전이 가능하고, 팔의 상단부분을 중심으로도 회전이 가능하다.
이는 직접 팔을 돌려보면 쉽게 알수있는 사실입니다.
팔꿈치는 고작 1자유도만을 가지고 있습니다.
그 말은 관절을 중심으로 굽히기와 펴기만 가능하다는걸 증명할수 있습니다.
손목을 3자유도를 가지고 있다고 할수있겠네요.
왜냐하면 손목의 안쪽, 바깥쪽으로 굽히거나 펼수 있으며, 팔의 직선상으로 회전또한 가능하기 때문이죠.
이렇게 계산하다보면, 작은 움직임일 지라도 인간의 팔은 사실 7자유도라고 표현 할수도 있겠습니다.
하지만 문제는
7자유도에는 단일해가 없음에도 불구하고 어째서 팔을 움직이는것이 가능할까요?
이전 포스팅에서 설명드린
로봇시스템에 있어서 말단장치는 한 개의 자유도를 가지지 않는다는 것을 알아야 합니다.
모든 로봇에 있어서 이러한 부가적인 말단장치의 능력이 마치 1자유도를 가진것처럼 보이지만,
말단장치의 어떤 움직임도 결코 로봇의 자유도를 결정하는데 추가되지 않기때문이죠.
또한 모든 시스템에는 제약이 존재하듯이
자유도에 있어서도 제약이 존재합니다.
6자유도보다 자유도가 적은 산업용 로봇이 일만적인 예로 들수 있겠습니다.
보통 3~5의 자유도를 가지는 것이 보편적이라 할수 있겠습니다.
사실
자유도가 적을수록 제어하는 입장에서는 매우 수월합니다.
자.
그렇다면
사람의 팔과 관절에 관해 이야기했으니
이번에는
로봇의 관절입니다.
로봇은 병진,회전,미끄럼,구형등의 다양한 관절구조를 가지고 있습니다.
다 사람이 만들어 주긴 했지만 가지수가 참 많습니다.
어쩌면...이익을 위한 특허를 내려고 하다보니 가지수가 늘어난것 일 수도 있습니다.
아무튼
보통 로봇은 회전관절이나 병진 관절을 많이 사용합니다.
병진관절은 선형이며, 회전 성분이 포함되지 않습니다.
보통 유압이나 공압으로 움직이며, 때로는 선형 전기 구동기가 사용되기도 합니다.
이러한 관절은 기중기나 원통형과 같은 관절 형태로 사용되어 집니다.
회전 관절은 회전이 가능한 유공합 관절이 일반적이기는 하나 대부분의 회전관절은 전기적으로
구동되는 스탭/서보 모터에 의한 구동형태가 대체적인 형상입니다.
정신없이 써내려간것같네요.
제 글은 너무 그림이 없다보니 지루해 하시는것 같아서 ㅎㅎ
얼마 없는 이웃까지 달아날까봐 구글에서 그림과 움짤을 퍼왔습니다.
http://ekoko.tistory.com/590
http://www.dwocean.co.kr/data/6%C0%DA%C0%AF%B5%B5.htm
다음엔 좌표계와 관련된 내용들을 올리겠습니다.
ㅎㅎ 글 안에 [글제목]/(링크) (/는 지워주셔야 되요) 를 쓰면 글제목에 하이퍼링크가 달려요~
예를 들어 [[Bio-technology] Step 1.0]/(https://steemit.com/kr/@joonghoonlee/bio-technology-step-1-0)
처럼요 ㅎㅎ, 이러면 해당 제목을 클릭하면 그 글을 바로 확인할 수 있어서 좋은 것 같아요
저기서 자유도를 생각할 때의 회전은 360도 회전을 말하는 건가요? 아니면 그냥 단순 회전을 말하는 건가요? 손목의 경우에는 팔을 편채 많이 돌려야 시계방향 혹은 시계반대방향응로 180도 밖에 안되는것 같아서요
또 로봇의 움직임을 사람처럼 자유롭게 해 주기 위해 다양한 로봇 관절들이 필요한 건가요? 로봇 공학을 보면 자유도를 많이 증가시키는 방향으로 진행되는 것 같은데 해당 자유도가 많으면 좋은건가요?
관련 자료를 더 찾아보니 손은 20 팔은 7 자유도를 가지게 하는 로봇들을 만들기 위한 연구들이 있다는 자료를 보아 꼭 자유도가 많다고 좋은건 아닌것 같군요
7 자유도 팔 관련 자료
신기하네요 ㅎㅎ 제가 거의 모르는 분야라 앞으로 올라오는 글들을 더 관심있게 읽어보도록 하겠습니다 ㅎㅎ
우와...저, 말쓸하신것처럼해봤습니다.
바로되네요 링크!!와....감사합니다 ㅎㅎ뭔가 알아가는 즐거움이란 ㅎㅎ감사해요 ㅎㅎ
로봇엔 문외한 이긴 하지만
RC비행기 나 헬기할때 몇채널인지에 따라 제어 가능한 움직이 달라지는 것과 같은 이야기 같군요.
^^ 달아나지 않고 가끔 공부하러 올께요~
오~ 네네 맞습니다 ㅎㅎ유사한 비유네요 ㅎㅎㅎ
말씀감사합니다 ㅠㅠ
글을 재미나게 쓰는건 정말 어려운일이네요 ㅠㅠ.....시간내어 읽어주셔서 감사합니다 ㅎㅎㅎ
비행기들이 부르르 부르르 떠는것 같아 재밌네요 ㅎㅎ
^^;;재미있으셨다니 다행입니다. ㅎㅎㅎ
비행기가 파닥파닥 움직여서 엄청 귀엽네요.ㅎㅎㅎㅎㅎㅎ
구글 거라지만~~ 좋은 예시네요~~
원래는 손으로 하나하나 그려서 사진찍어올렸었는데
뭔가....다들 지루해하시는것같아서
편하고...재미있는 구글링으로 바꿔보려구요 ;;ㅎㅎㅎㅎ
한때 로봇 관련 회사에 종사했었기에, 내용이 익숙한게 많이 보입니다. Introduction to Robotics: Mechanics and Control이란 책을 읽었었는데.. 음 덕분에 로봇공학을 전혀 몰랐는데 조금 이해하는데 도움이 되었던게 기억나네요 ㅎㅎ.
저도 학창시절 공부하던 전공서적이 동일 서적일겁니다.
교수님께 사람이되어야 한다며...잔소리 들으며, 책을 거의 달달외우듯이 공부를 했었으니까요 ㅎㅎ동종업계 종사자분을 뵈어 영광입니다.