AI Robot Assists Scientist Understand Human-Machine Cooperation
It's a robot that first guesses then irritates users by rebelling versus their strategies!
In a new advancement in human-robot research, computer researchers at the University of Bristol have actually developed smart, handheld AI robots that initially guesses then irritates users by rebelling versus their strategies, hence indicating an understanding of human intention.
In a developing technological world, cooperation between machines and people is an important element of automation. This brand-new research shows aggravating individuals intentionally as part of the process of establishing robots that better work together with users.
The Bristol group coached the robot in the research study using a suite of over 900 training examples from a pick and location task carried out by individuals.
What research team was behind this AI robot?
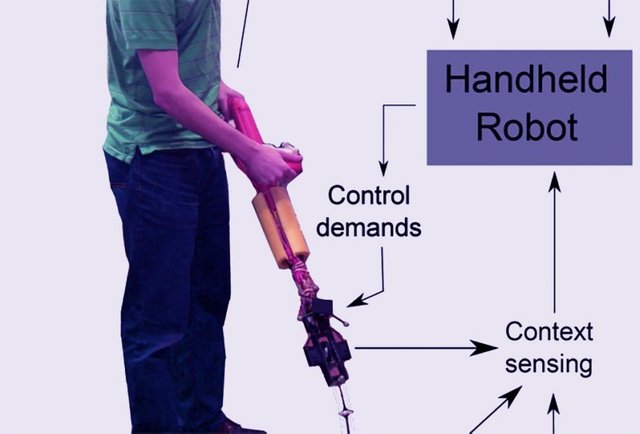
The team at Bristol has established wise, portable AI robots that complete tasks in collaboration with the user. Contrary to standard power tools, that know nothing about the tasks they perform and are entirely under the control of users, the portable robot maintains understanding about the task and can help through fine-tuned motion, guidance, and choices about task sequences.
The current research study in this area by Ph.D. applicant Janis Stolzenwald and Professor Walterio Mayol-Cuevas, from the University of Bristol's Department of Computer Science, browses the use of intelligent tools that can influence their choices in response to the intent of users.
Professor Mayol-Cuevas said: "If you are irritated with a device that is suggested to assist you, this is much easier to spot and determine than the often unclear signals of human-robot cooperation. If the user is frustrated when we inform the robot to go against their strategies, we know the robot comprehended what they wanted to do."
"Just as short-term forecasts of each other's actions are important to effective human team effort, our research study shows incorporating this ability in cooperative AI robotic systems is essential to effective human-machine cooperation."
Professor Mayol-Cuevas
This research study is an ingenious and stimulating twist on human-robot research study as it targets to forecast first what users desire and then go against these ideas.
For the experiment, scientists used an Artificial Intelligence model that can trail the user's eye look and develop short-term forecasts about scheduled actions through machine learning. This knowledge is then utilized as a base for the robot's choices such as where to move later.
Central to this research study is the assessment of the intention-prediction model. The scientists attempted the robot for 2 cases: rebellion and obedience. The AI robot was programmed to disobey the forecasted objective of the user. Understanding the user's objectives gave the robot the power to break their choices. The variance in disappointment responses between the two circumstances acted as proof for the accuracy of the robot's forecasts, hence backing the intention-prediction design.
Janis Stolzenwald, a Ph.D. trainee, financed by the German Academic Scholarship Structure and the UK's EPSRC, carried the user experiments and acknowledged new obstacles for the future. He said: "We found that the objective design is more handy when the gaze information is accompanied task understanding. It brings up a brand-new research concern: how can the robot recover this knowledge? We can picture learning through demonstration or including another human in the job."
In the groundwork for this brand-new challenge, the researchers are currently exploring shared control, cooperation, and new applications within their studies about remote association through the handheld robot. A maintenance task acts as a user experiment, where a handheld robot user obtains support through a professional who a little controls the robot.
Former Ph.D. trainee, Austin Gregg-Smith built and developed the handheld robot which was utilized for the research study. The research is available as an open-source design through the researcher's site at followtechnology.pw
@upvotebank where are you?