Mechanical vibration
hi, every one, I want to share with you something about a physical model change to the stochastic process model.
The dynamical physical system considered is mechanical vibration, specifically, a single degree of freedom vibrating system. A single-degree-of-freedom system only requires one coordinate to describe the state of the system at any time. In mechanical vibration, the general governing equation of motion for a single degree of freedom dynamic system has the form:
x′′(t)+r(x)+c(x, x′) = f(t), [1]
where x(t) is the displacement of the mass from the rest point, r(x) represents restoring forces, c(x, x′) models damping forces, and f(t) is a stochastic excitation process. Engineering applications of stochastic differential equation [1] arise, for example, in reliability analyses of structures subject to wind, current, or earthquake loads. We will develop a model of the form [1] for the spring-mass system, illustrated in Fig 1, where x(t) is the displacement of the mass from equilibrium, v(t) = x′(t) is the velocity, m is the mass, and M(t) = mv(t) is the momentum. Let kx(t) be the spring displacement force and let bv(t) be the damping force or the force due to friction. The deterministic system of ordinary differential equations that describe the dynamics of the spring-mass system has the form
dx(t)/dt= v(t)
dM(t)/dt= −kx(t) − bv(t)
with x(0) = x0 and v(0) = v0. Notice that for a small time interval
ΔM = M(t + Δt) −M(t) ≈ −kx(t)+bv(t)Δt.
Next assume that impulsive forces are applied randomly to the mass. Specifically, in any small time interval Δt, assume that the probability equals λΔt for a positive or negative change in the momentum of magnitude γ. Let ΔM be the change in the momentum in time Δt. There are three possible changes in time Δt and these are listed in Table 5.5 along with their respective probabilities. Notice that for any change in momentum, the term (−kx−bv)Δt is
included.
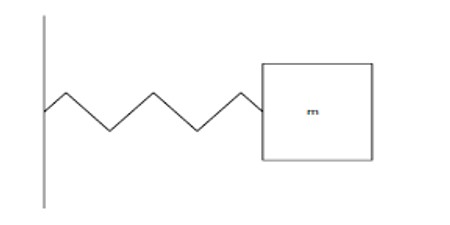
A single-degree-of-freedom spring-mass system
Possible changes in the momentum of the spring-mass system with the corresponding probabilities Change in Momentum Probability
ΔM1 = γ +(−kx − bv)Δt p1 = λΔt + o(Δt)
ΔM2 = −γ +(−kx − bv)Δt p2 = λΔt + o(Δt)
ΔM3 = (−kx − bv)Δt p3 = 1 − p1 − p2
Follow me @falcao12
amazing... I would try posting under some new tags, like mechanical or engineering. Even if they aren't popular tags, someone might look there. Things pretty much get lost in life and steemit, fyi
you are right my friend!! thank very much for your advice!!