Robotic Hands
Robotic Hands
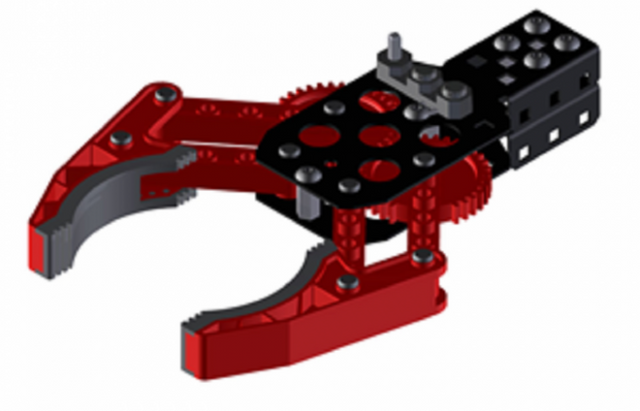
You get various types of robotic hands. The first type is just a few simple grippers, that can grip and can get a specific job done, without fuss. It is the type as shown in the photo below. You get various types that could use more fingers and different setups etc. These hands are normally customized for specific applications
{kind=link}
{kind=link}
Then you get types that try to copy the human hand. This is very complex robotic hands.
To achieve the mobility of a normal human hand, various mechanical systems are used, making use of hinges, links and gimbal systems. This method is however flawed as the movements are never human like.
Mister Xu and Todorov from the University of Washington, however followed a different approach, by laser scanning the skeleton of a human hand, and then 3D printed the bones, which they then used as basis for their robotic hand. High strength Spectra strings were used as ligaments. (According to Wikipedia, the strength to weight ratio of Spectra is between 8 - 15 times that of steel) The hand's muscles are made up of a number of servo motors and cables.
In the video below the robotic hand is controlled from a human hand, and it can be seen how closely this robotic hand mimics a human hand. This is amazing!!
These types of robotic hands are envisaged to in future replace real limbs that have been injured or amputated. In 2012 it was already proven that an artificial limb could be controlled by the human brain. A quadriplegic who had a small device planted into her brain controlled a robotic arm, as can be seen in the rather long video below.
Then you get robotic hands that are not a hand at all. Below is an example of the Versaball, which is an example of this. This is a real simple design, which is very versatile. The Versaball can handle a verity of objects with precision and speed. The Versaball is basically a rubber body filled with synthetic sand. The rubber body is filled with air, which softens the body allowing the sand to flow. The hand is then lowered over the object to be picked up. It then takes on the shape of the object. The air is then pumped out of the ball, jamming the sand tight around the object. The friction created by this then grips the object that can then be picked up. When the object must be released the air is pumped back into the ball, releasing the object.
There is a place and application for each of the above robotic "hands" depending on the situation and job at hand.
Below is another video of a hand controlled by the human mind in 2009.
Amazing!!
Thank you for reading, I hope you enjoyed the post.