Build your own line follower robot step by step
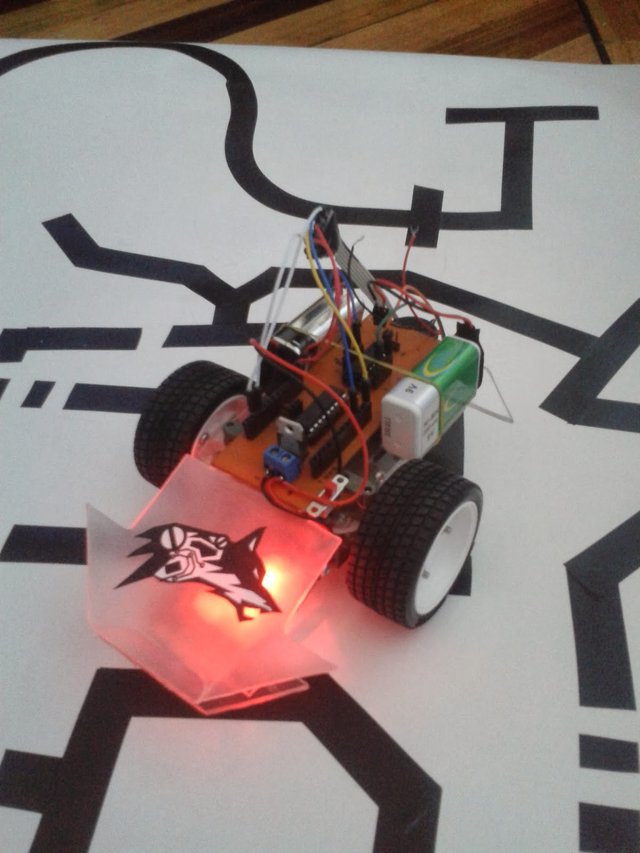
In this blog I will share how to make a follower of black line.
Line-following robots are very simple robots,
that fulfill a single mission: to follow a line marked in
the floor (usually a black line on a background
White).
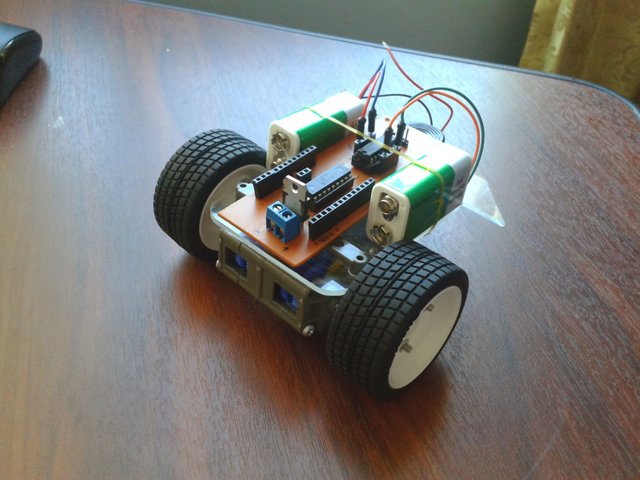
Basic Structure
These robots can range from the most basic (go after
a single line) to robots running through mazes.
All of them, however, have (usually) certain
basic common parts among all:
Sensors
A tracker detects the line to be followed by
of sensors. There are many types of sensors that can be
use for this purpose; however, for reasons of cost and
practicality the most common are infrared sensors
(IR), which normally consist of an infrared LED and a
phototransistor.
Engines
The robot moves using engines. Depending
size, weight, engine accuracy, among others
factors, these can be of several kinds:
direct current, stepping motors or servomotors.
Wheel
The wheels of the robot are moved by the motors.
Non-slip material wheels are normally used
to avoid traction failures. Your size is another factor to have
account when it comes to assembling the robot.
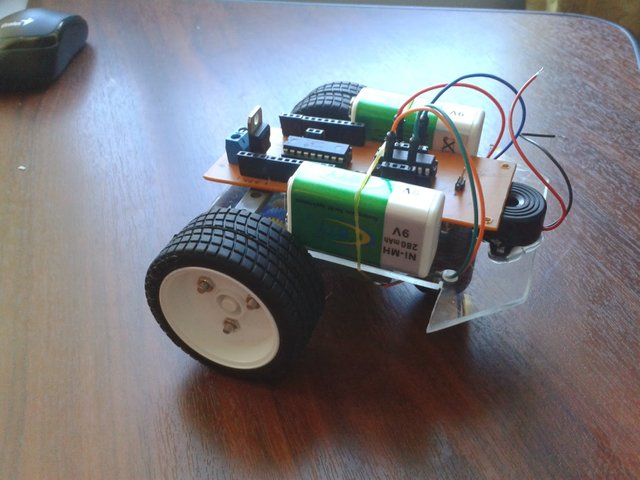
Power source
The robot gets the energy it needs
for operation of batteries or a source of
alternating current, the latter being less used because of
which deprives the robot of its independence.
Control card
Decision-making and control of
motors are usually run by a microcontroller.
The control card contains this element, together with other
basic electronic components required by the
microcontroller to operate.
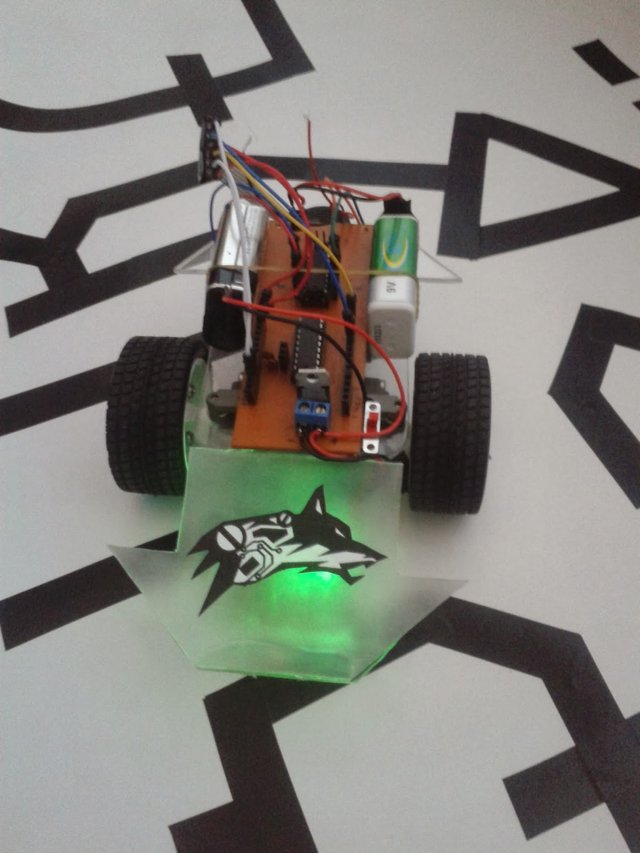
Functioning
All trackers base their operation on the
sensors. However, depending on the complexity of the
the robot must be more or less complex (and, for
use more or less sensors).
The simplest trackers use 2 sensors, located
at the bottom of the structure, next to each other. When
one of the 2 sensors detects the white color, it means that the
robot is coming off the black line on that side. In that
moment, the robot rotates to the opposite side until
is back on the line. This in the case of
black line followers, as there are also followers of
White line.
The 2 most common ways to arm the trackers are:
OPAMPS (Operational Amplifiers), or with simple
transistors worked in their saturation zone. This
depending on the complexity with which you want to arm the
circuit. We can use a microcontroller to perform
control functions or save the
tour of a track. Also serves as a scanner
electric .
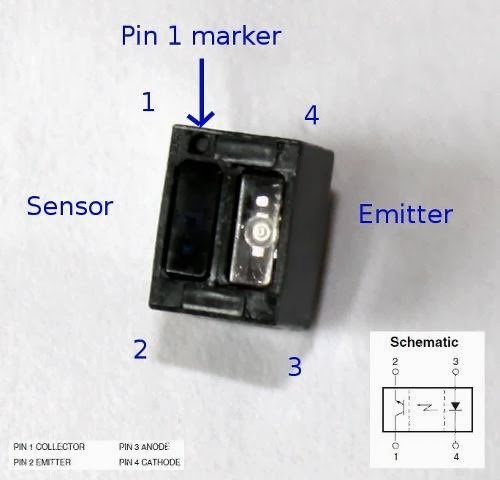
Infrared Sensor QRD1114
Description
This sensor uses an infrared emitting diode in
combination with an infrared phototransistor to detect
Infrared signals. It is used to detect black-
White (robots follow-lines) or to detect nearby objects
(0.5 to 1 cm).


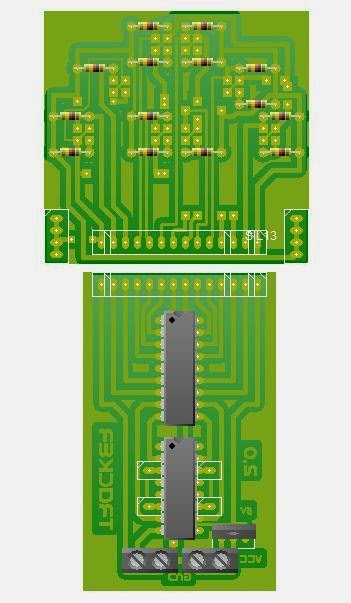
PIC 16F628A
It is the programmable microcontroller in which information from the sensors is processed
THE PCB





Hola @alexzoid, upv0t3
Este es un servicio gratuito para nuevos usuarios de steemit, para apoyarlos y motivarlos a seguir generando contenido de valor para la comunidad.
<3 Este es un corazón, o un helado, tu eliges .
: )
N0. R4ND0M:
9249 9161 3913 4609
2267 5521 5556 8598
2459 6475 5316 3072
3907 6878 9979 1828
Congratulations @alexzoid! You received a personal award!
You can view your badges on your Steem Board and compare to others on the Steem Ranking
Vote for @Steemitboard as a witness to get one more award and increased upvotes!